
Prototype
Wiring
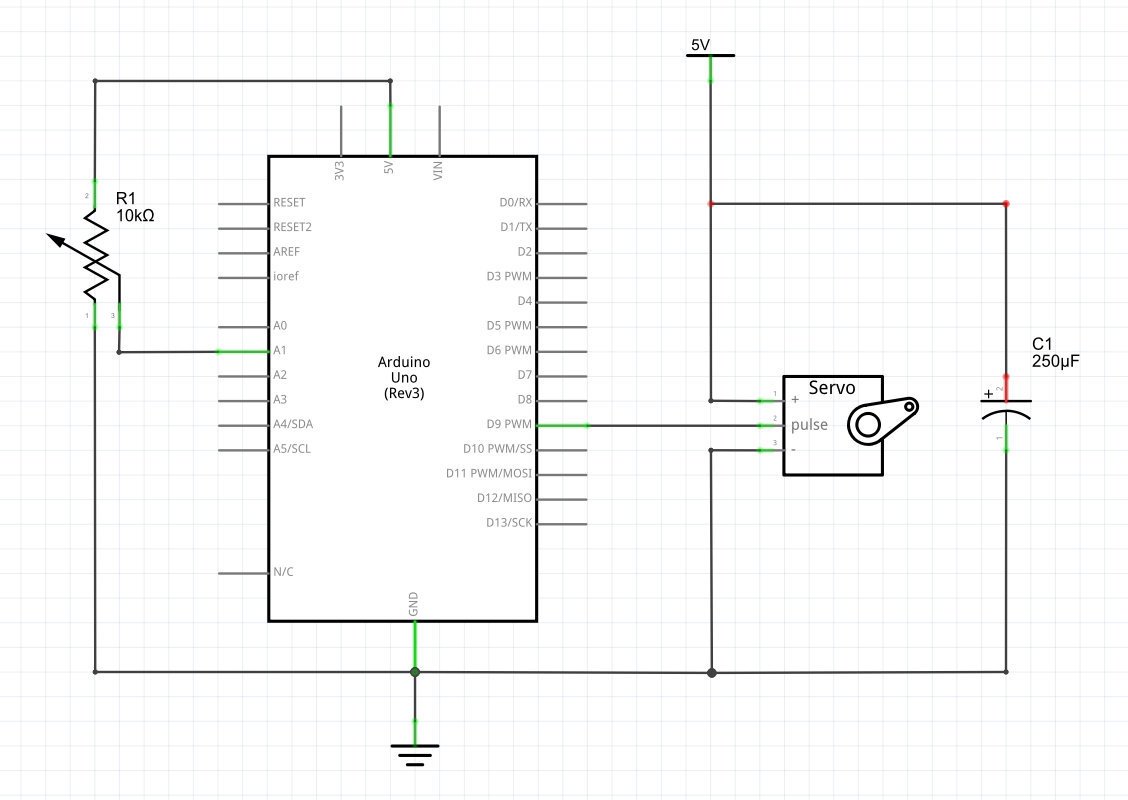
Schematic
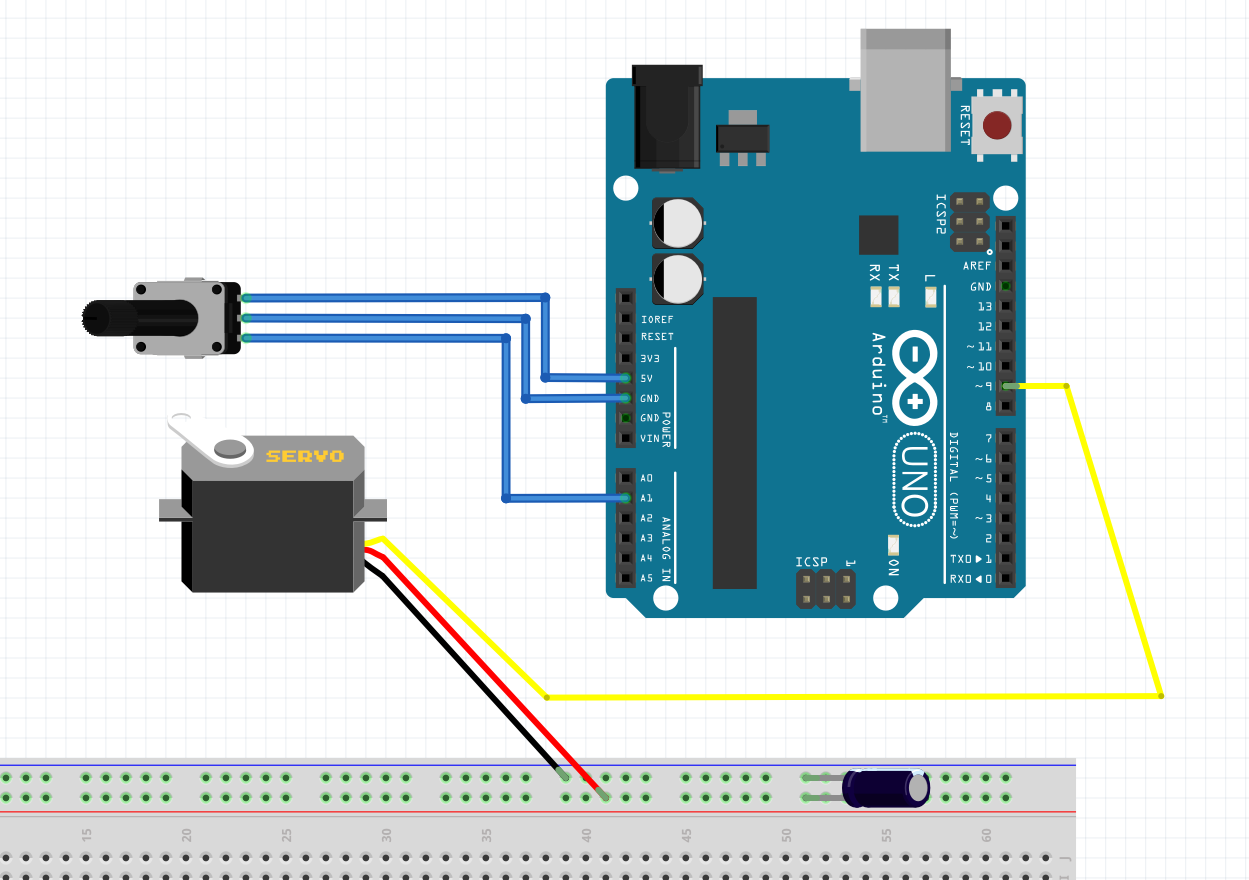
Breadboard view
Code for the controller
#include
double error = 0;
double dtError = 0;
double old_error = 0;
double potValue = 0;
double oldPotValue = 0;
int ctrlSign =0;
int directrion =0;
int wait = 5;
String temp;
int setValue = 0;
int kp = 12;
int kd = 1;
void setup()
{
Serial.begin(9600);
myservo.attach(9);
myservo.write(105,255,true);
delay(1000);
potValue = analogRead(1);
setValue = potValue - 50;
}
void loop()
{
potValue = analogRead(1);
sendPotValue(potValue);
delay(wait);
//printInfo();
// Filter input
potValue = (0.5 * potValue + 0.5 * oldPotValue) + 0.5;
// Control part
error = (setValue - potValue);
// Derivitive (delta e / delta t)
dtError = (error - old_error);///(wait*0.001);
// PD-control
ctrlSign = kp * error + kd * dtError;
// Set servo speed and direction
if(failSafe(error))
{
setSpeed(ctrlSign);
}
// Update old error
old_error = error;
oldPotValue = potValue;
}
void setSpeed(int out)
{
if(out <= -1)
{
myservo.write(170, (int)abs(out), false);
}
else if(out >= 1)
{
myservo.write(10, (int)abs(out), false);
}
else// Do nothing
{
myservo.write(myservo.read(), 0, false);
}
}
int failSafe(int val)
{
// Error is too big
if(val < -10 || val > 10)
{
myservo.write(105,40,true);
return 0;
}
else
{
return 1;
}
}
void printInfo(){
Serial.print(setValue);
Serial.print(", ");
Serial.print(potValue);
Serial.print(", ");
Serial.println(error);
}
int getAngle(int potValue){
return (int)((setValue - potValue) * 3.5);
}
void sendPotValue(double potValue)
{
Serial.write('@');// Start stream
Serial.flush();
writeStream(potValue);
Serial.write('#');// End stream
Serial.flush();
}
void writeStream(double potValue)
{
temp = String(potValue);
byte charBuf[temp.length()];
temp.getBytes(charBuf, temp.length() + 1);
Serial.write(charBuf, temp.length());// Write data
Serial.flush();
}